
I’m a Ph.D. candidate at the University of Michigan, advised by Dmitry Berenson! I am interested in the algorithmic foundations of decision-making under uncertainty. My goal is to construct resilient, provably safe systems for low-structure environments.
Some time ago in a rainy place far, far away, I obtained an M.Eng. in Aeronautical Engineering @ Imperial College London. There, I collaborated with Panagiotis Angeloudis on safety for learned autonomous vehicles policies, and with Yiannis Demiris on modeling multi-material food manipulation interactions for assistive feeding.
I'm always happy to collaborate and answer questions about my research.
News
| Jun 2026 | Presenting “Lies We Can Trust” as an Oral Spotlight @ Geometry in the Age of Data‑Driven Robotics Workshop, ICRA |
|---|---|
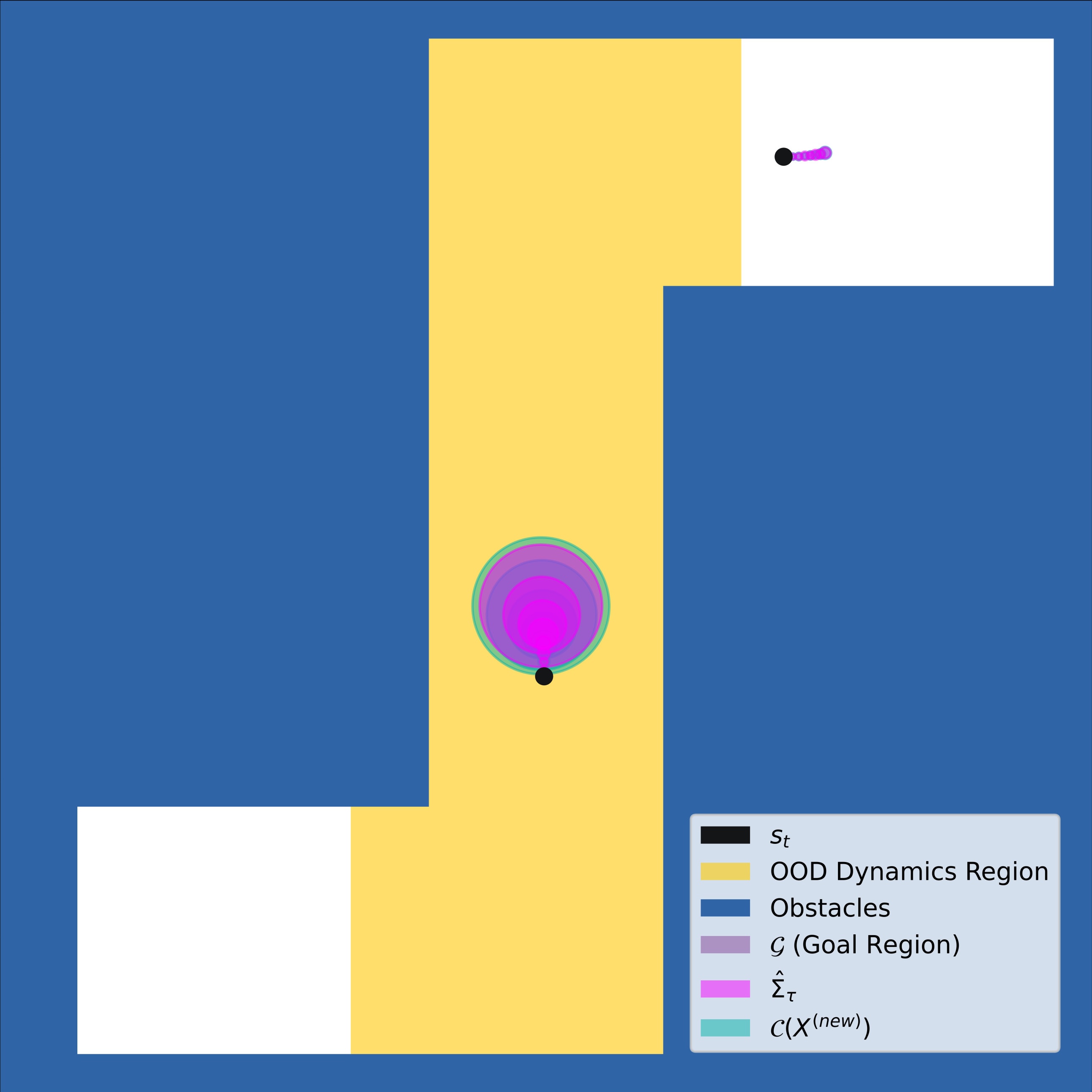
| Apr 2026 | “Local Conformal Calibration of Dynamics Uncertainty from Semantic Images” has been accepted to WAFR 2026! |
| Jan 2026 | “Lies We Can Trust: Quantifying Action Uncertainty with Inaccurate Stochastic Dynamics through Conformalized Nonholonomic Lie groups” has been accepted to RA-L! |
| Nov 2025 | Grateful to have been recognized with an Outstanding Reviewer Award at ICMI 2025. |
| Feb 2025 | Happy to receive a Rackham Graduate Student Research Grant (university-wide) to help support hardware experiments. |
Selected Publications
-
 In 17th World Symposium on the Algorithmic Foundations of Robotics (WAFR), 2026.Key Takeaway: Used latent observations to calibrate dynamics uncertainty conditioned on state-action-observation, enabling probabilistically safe motion plans under model mismatch in unseen test environments.
In 17th World Symposium on the Algorithmic Foundations of Robotics (WAFR), 2026.Key Takeaway: Used latent observations to calibrate dynamics uncertainty conditioned on state-action-observation, enabling probabilistically safe motion plans under model mismatch in unseen test environments. -
 In IEEE Robotics and Automation Letters (RA-L), 2026.Key Takeaway: Calibrated the uncertainty estimates of Lie-algebraic Gaussian estimators, extending conformal dynamics calibration from point robots in Euclidean space to systems with configurations in SE(2).
In IEEE Robotics and Automation Letters (RA-L), 2026.Key Takeaway: Calibrated the uncertainty estimates of Lie-algebraic Gaussian estimators, extending conformal dynamics calibration from point robots in Euclidean space to systems with configurations in SE(2). -
 In 16th International Workshop on the Algorithmic Foundations of Robotics (WAFR), 2024.Key Takeaway: Calibrated dynamics uncertainty in the robot’s state-action space, improving plan efficiency, safety, and enabling plan steering towards regions of lower predicted uncertainty.
In 16th International Workshop on the Algorithmic Foundations of Robotics (WAFR), 2024.Key Takeaway: Calibrated dynamics uncertainty in the robot’s state-action space, improving plan efficiency, safety, and enabling plan steering towards regions of lower predicted uncertainty.