Luís F. S. Marques
Ph.D. candidate @ University of Michigan • 🪐

I’m advised by Dmitry Berenson! I am interested in the algorithmic foundations of decision-making under uncertainty, with a focus on settings where: (i) available models are not sufficiently accurate nor calibrated, (ii) data is costly, sparse or corrupted, and (iii) few assumptions might be made about the data-generating process. My goal is to construct systems capable of resilient, provably safe operation in low-structure settings.
Some time ago in a rainy place far, far away, I obtained an M.Eng. in Aeronautical Engineering @ Imperial College London. There, I collaborated with Panagiotis Angeloudis on safety for learned autonomous vehicles policies, and with Yiannis Demiris on modeling multi-material food manipulation interactions for assistive feeding.
News
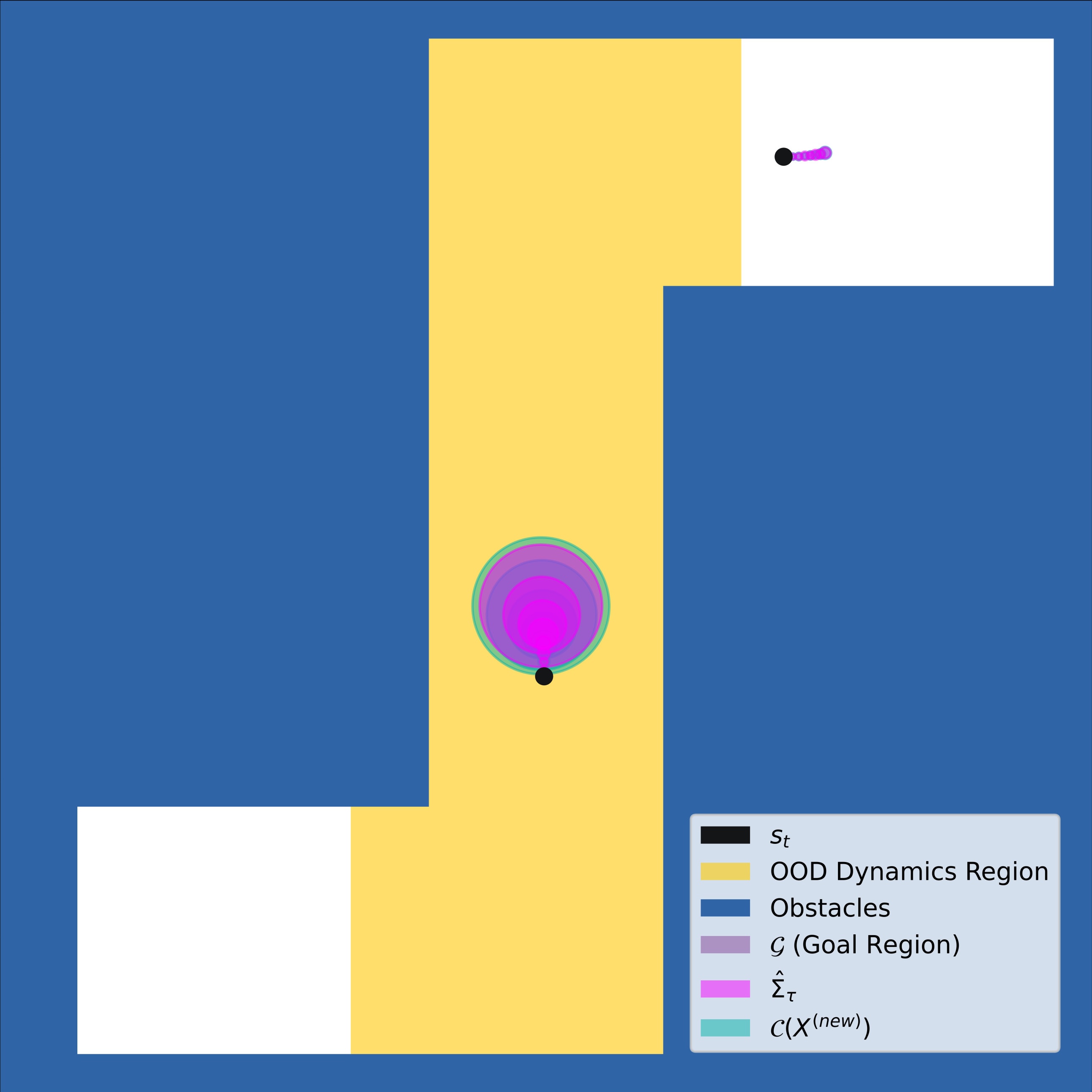
| Dec 2025 | “Quantifying Action Uncertainty with Inaccurate Stochastic Dynamics through Conformalized Nonholonomic Lie Groups” is now out on arXiv! |
|---|---|
| Nov 2025 | Grateful to have been recognized with an Outstanding Reviewer Award at ICMI 2025. |
| Feb 2025 | Happy to receive a Rackham Graduate Student Research Grant (university-wide) to help support hardware experiments. |
| Dec 2024 | I have passed my qualifying exams and advanced to Ph.D. candidacy! |
| Nov 2024 | Happy to receive the Rackham International Student Fellowship (university-wide) to help cover my tuition costs. |